相非相:交通革命与未来文明
生命从诞生的那一刻起,便在基因密码的驱使下探索未知世界,不断扩张生存领地。孢子随风飘散,单细胞生物随着洋流在海洋中漫延,动物迁徙应对致死的季节变化……而人类,创造了多种可完全掌控的交通方式,用轮子取代双腿丈量大地,用发动机突破肌肉力量的桎梏。
每一次交通的革命,都在重塑文明的版图。
——相非相(工学博士,硕士生导师,现任某科学研究院首席工程师,出版长篇小说《好孕进行曲》等多部著作,短篇小说散见于《科幻世界》等杂志。)
01
交通与文明
六万年前,广袤而古老的东非大草原上,天空如宝石般湛蓝。旱季即将到来,不远处的草原上,角马们在不断聚集。它们挤成一团,围绕看不见的圆心奔跑。突然,圆心的领头角马发出低沉而悠长的吼叫。这声音如同发令枪响,无数匹角马组成的黑色洪流浩浩荡荡地朝着北方进发。酋长也吹响了出发的哨声。为躲避将要到来的断粮厄运,部落酋长决定率族人向北迁徙。智人部落简陋的茅草屋里,少女露西恋恋不舍地与腿脚不灵便的外婆拥抱告别。
几十天的长途跋涉,露西的脚被磨出了血泡。看着奔腾的角马,她有时候幻想,如果能骑在它们背上狂奔该多好啊!经过艰难跋涉,露西和族人终于到达了非洲北部草原,并在那里驻扎下来,繁衍生息。
在露西幻想将动物作为交通工具的近六亿年之后,人类终于驯服了马匹。其后的五千年,人类将马匹作为主要骑乘工具 , 并发明了以其为动力的马车。

电影《走出非洲》女主角凯伦坐马车出行的镜头
18 世纪的工业革命给人类带来了蒸汽机。蒸汽轮船与蒸汽火车,使人类彻底摆脱了长达几千年靠生物力推动交通工具的历史的困境。18 世纪末到 19 世纪初,现代汽车和可控动力飞机相继出现,使原材料与商品流动效率提升了上百倍,极大地推动了交通运输与经济的发展。

《泰坦尼克号》剧照
每一次交通革命都在重塑文明的空间格局、社会结构和文化认知。在人类突破自然限制、追求连接的天性驱使下,应用 AI 技术的自动驾驶汽车成了如今最受关注的交通变革之一。
02
自动驾驶原理
与飞机、轮船和火车的自动驾驶相比,汽车实现自动驾驶的难度更大。其原因主要有两个 :一是,汽车运行在开放道路上,道路拓扑多变,交通规则与环境十分复杂,行人、其他车辆等动态障碍物众多,而飞机在三维空间中移动,障碍物很少 ;火车在环境封闭的固定轨道上运动,障碍物可控。二是,汽车需要极快的反应速度以处理突发事件,比如横穿马路的行人,其他车辆加塞、换道等。自动驾驶汽车的反应速度一般要求达到毫秒级,而轮船一般为秒级,飞机为分钟级。目前,汽车自动驾驶实现的路径是模拟人类的驾驶行为,采用感知、智能决策和控制执行三层技术架构。
自动驾驶汽车上安装有许多不同类型的传感器,实现对自身状态和环境数据的提取,包括车轮转速传感器、加速度传感器、转角传感器等自体运行传感器,以及摄像头、红外摄像头、超声波雷达、毫米波雷达、激光雷达等环境传感器。
摄像头与雷达的适用环境各不相同。一般摄像头清晰测量距离在 25 米内,成本低,但是受环境光照影响大,极端恶劣天气下会失效。超声波雷达检测距离一般在 10 米内,不受光照影响,成本低,但是精度受物体表面形状、材质影响大。毫米波雷达观测距离可达 100 米,不受天气影响,测距精度高、范围广,但无法识别道路标志,难以识别行人。激光雷达测量距离高达 200 米,可精确测量环境信息,但是成本高,在大雾、雨雪天气下的效果一般。
实际上,上述配置对外界环境的探测能力已经远超人眼。人眼在夜间路灯照明的道路上、暴雨与大雾环境中,视线严重受限 ;在强炫光(夕阳直射、对向车远光灯直射)的情况下,还会短暂致盲。而上述雷达加摄像头套装,可以通过红外补光解决夜间照明不足的问题,毫米波雷达可以穿透雨雾,强眩光对雷达无影响,摄像头可以通过算法抑制过曝,很好地解决不利场景下的视线视距问题。

美剧《彼得的自动驾驶汽车》中在校园里随意穿梭的无人驾驶汽车
人眼在交通标志识别方面有优势。由于可识别 5.76 亿像素的视觉信息,能分辨上千种颜色,人眼对交通标志、文字等细节的捕捉效率和正确性远超摄像头。但是 , 交通标志的设计本就是基于人眼识别的特性 , 并在大量生理与心理测试后确定下来的,现有交通标志不适于机器识别是很正常的。有研究人员正在开发适应于机器识别的数字化道路交通标志,这种标志摒弃了图形、文字标志的形式,直接使用数字的形式,通过短程无线通信系统发送给车辆,其识别的准确率远超人眼加图像标志的模式。
自动驾驶汽车对获取的外界环境、车辆运行数据进行综合分析之后,形成智能决策,并通过调节油门与刹车、方向盘转角对车辆进行控制。在这个阶段,会将摄像头与雷达等传感器的原始数据融合,转化为结构化信息,使用图像识别模型识别出车辆、行人、交通标志等,并对车辆周边场景进行分割,划分出车道线、可行驶区域和障碍物边界。然后对行人、车辆等移动物体的意图——未来秒级移动轨迹进行预测,并计算碰撞概率。
自动驾驶车辆还会对路径进行不同层面的规划,包括基于实时交通状况的最优线路规划、交通规则驱动的标准化场景行驶规划,例如红灯停车、路口左转提前进入左转车道等。而对于某些复杂场景,比如变道超车、加塞等,不少车企会用人类驾驶员的操作数据来对模型进行训练。车辆运动规划在满足动力学约束条件下,生成平滑、安全的轨迹。在保证安全的情况下,轨迹和运动的平滑性十分重要。某新能源车的激进智能驾驶模式,由于跟车距离短,经常会急刹车,对周围车辆采用“对抗”策略,频繁变道和加塞,容易造成乘客晕车。
目前,在交通环境比较简单的情况下,比如高速公路封闭道路或者行人极少的区域,自动驾驶的水平已接近人类。但对于情况复杂的开放式道路,自动驾驶水平不及人类。因此,自动驾驶技术现在主要应用于园区内固定线路的无人巴士,矿区、港口、机场等封闭园区的物流,低速物流配送等领域。
03
智驾≠自驾
两年前,笔者买了一辆带智能驾驶功能的新能源车。该车外部安装有 6 颗摄像头,分别观察前、后、左、右和车底,车内安装了两颗摄像头,其中一颗专门用于检测驾驶员有没有疲劳、驾驶是否分心。近距离和低速行驶下表现良好的超声波雷达,便宜又大碗,装了 12 个。分辨率高、穿透性强,能在雨、雪、雾天气下正常运转的毫米波雷达装了 5 个。摄像头和雷达获取的图像经过处理之后,显示在车机大屏幕上。
智驾汽车提供了很多无需驾驶员自己动手的功能,比如自动泊车。只需要在屏幕上选好车位,点击自动泊车按钮,放开方向盘和脚踏板,汽车会自己转动方向盘,把车停入车位。
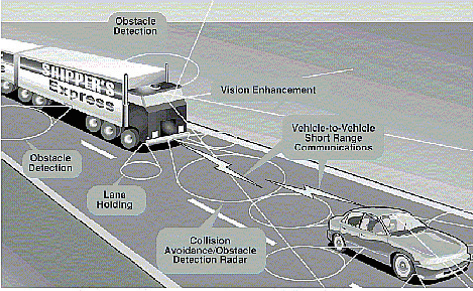
最早的自动驾驶原理图
提车后,我打开所有智驾功能,轻松愉快地开启了白洋淀之旅。然而,我没有料到的是,路途上,汽车与我展开了一场方向盘争夺大战。
正常情况下,智驾的车道保持功能可以使汽车沿着道路中线前进。但是在弯道,尤其是地上标线不那么清晰的弯道,汽车不是直愣愣地朝中央隔离带冲过去,就是提前拐弯到隔壁车道,引起一连串喇叭声。于是我只好自己控制方向盘。然而,方向盘开始跟我较劲,它变得异常沉重,得使上很大力气才能让车听话。即使在角力中我胜了,方向盘的转向也绝不顺滑连续,而是突然跳一格,然后又开始抵抗。最后,为了保证安全,我不得不关掉智驾功能。
不是所有的人都像笔者一样更相信自己的判断。很多人轻易地把方向盘的控制权出让给了并不完美的车机系统。在视频网站上搜索“自动驾驶”,会看到大量的车在高速公路上呼呼猛跑,驾驶员放倒座椅,盖着被子,呼呼大睡。然而,不是人人都这么幸运。那些随意放弃汽车控制权的人们,可能都不清楚一个事实——智驾不等于自驾!
2021 年发布的国家标准《汽车驾驶自动化分级》(GB/T40429-2021)规定,汽车自动驾驶等级分为 0 到 5 级,也就是业内常说的 L0 — L5,级别越高,自动化程度越高。在众多自动驾驶等级中,只有 L5 是完全自动驾驶。
其中,L0 为应急辅助,车辆仅提供碰撞预警、紧急制动等应急辅助功能,驾驶员需全程控制车辆。
L1 为部分驾驶辅助,车辆可连续执行单一的横向(如车道保持辅助)或纵向(如自适应巡航)控制任务。
L2 为组合驾驶辅助,车辆可连续同时执行横向及纵向多种控制任务。目前,大部分的智驾汽车属于这个等级。
L3 为有条件自动驾驶,车辆可以在某种设定的条件下完全自主驾驶。系统在识别到不满足设定条件时,会及时向后援用户发出介入请求。后援用户可以是驾驶员,也可以是远程控制人员。L3 往往无法处理复杂场景和突发场景。
L4 为高度自动驾驶,车辆在设定的区域或条件下完全自主驾驶,无需人类干预。系统能识别驾乘人员是否符合设定条件,车辆是否在设定区域内运行。百度在全国 11 个城市开展的萝卜快跑出租车测试运营服务就属于 L4。部分萝卜快跑车辆配备有远程监控人员。
L5 为完全自动驾驶,是自动驾驶的顶级阶段。车辆在所有路况、所有地区均可完全自主驾驶,无需人类干预。如果系统判断车辆运行存在安全风险,而此时人类想要掌握车辆控制权,车辆可以拒绝移交。
目前,没有一个车企宣称自己的车能达到 L5。随意将控制权交给达不到 L5 的汽车,就像玩一场俄罗斯轮盘赌游戏——在左轮手枪的六个弹槽中塞入一颗子弹,任意旋转转轮,然后对着自己的脑袋扣动扳机。
04
变异的货车
人类对失控的汽车存在着与生俱来的恐惧。
斯蒂芬·金的短篇小说《重型卡车》,描写了一辆重型卡车无端攻击人类的故事。故事中,所有汽车突然获得自主意识,开始撞击、碾压人类。幸存者被堵在加油站、便利店里面,与失控的卡车展开生死搏斗,却被卡车自杀式的进攻打得落花流水。最后,除少数被逼着帮卡车加油的人活下来外,人类几乎被灭绝,结果十分惨烈。
斯蒂芬·金在创作该小说的时候,自动驾驶尚未萌芽,智能驾驶尚未大规模商用化。因此,小说中的卡车只能通过灯光闪烁来发送莫尔斯码,告诉人类帮它们加油就能免死。如果是现代汽车就不用那么麻烦了,可以直接用车机的语音指挥人类。
《重型卡车》中的卡车们非常凶狠残暴,但显然不太聪明。它们大概没有想过,帮他们加油的人类如果没有足够的生活物资,大抵也活不了多久。而汽油生产有一条很长的产业链,包括地质勘探、储量评估、钻井、开采、储存、炼化等诸多环节,需要有金属冶炼、制造等一系列工业配合。一旦破坏了这个链条中的任意一个环节,它们迟早会变成摊在地上的一堆废铁。
好莱坞大制作电影《速度与激情 8》中,反派塞弗通过侵入纽约街区的车联网系统,控制了所有搭载自动驾驶功能的汽车。这些汽车的仪表盘显示“激活自动驾驶”之后,被远程操控,拥入机动车道,与正常车辆碰撞,甚至冲出高层停车楼,形成汽车雨,砸向地面。

《速度与激情8》剧照
科幻短篇小说《自动驾驶》中,黑客杨骏通过修改路侧信息装置中的坐标信息,使自动驾驶的车辆提前行驶出匝道,制造一连串的车祸。他还控制其他车辆,阻挡冲向无辜人们的汽车。
上面的故事中,自动驾驶车辆遭受的攻击来自多个渠道。因此,自动驾驶系统的信息安全防护不仅要针对车辆节点,还要对包含车辆、路侧设施、通信、云平台的整体生态系统进行防护。
目前,自动驾驶信息的主要安全防护包括下面三个部分。
一是,车辆信息安全防护。包括 :操作系统安全(核心是确保系统行为总是处于受控状态,同时确保自身升级更新的可控性)、固件安全(芯片应支持加密算法 ;固件代码应能防止反汇编,增加逆向难度 ;固件升级应有完备的认证和校验机制,以及可靠的回滚机制)、数据安全、密钥安全(密钥信息应隐藏在加密库中,应支持动态密钥)、远程固件升级(需配合安全防护措施,确保升级更新安全)。《重型卡车》中,卡车们极有可能是操作系统和固件(如果有的话)受到攻击,被篡改了。
二是,网络安全防护。包括网络传输安全和网络边界安全。网络传输安全主要体现在实施网络加密和数据分级保护技术、建立可信的计算平台、使用网络防火墙等方面。在边界安全方面,由于自动驾驶系统涉及车载网络、车际网络、移动互联网等多种异构网络,彼此连接、融合,拓扑结构复杂,面临安全边界扩大、边界隔离困难、安全风险点多等挑战。通常,采用如下安全防范方法 :在架构设计中,采用网络分段和隔离技术 ;在端设备接入网络前,增加认证机制,确保设备的可信性 ;在端与云的通信中,需进行双向认证,保障整个网络的安全可信。《速度与激情 8》中,车辆可能是网络安全防护做得不到位,被反派攻破。
三是,云平台安全防护。云平台安全防护应同时考虑物理环境安全、计算存储安全、可信计算、网络安全、管理安全、信息安全、应用安全等多个维度。
05
自动驾驶汽车与“聪明的”路
科幻小说《自动驾驶》中,描写了这样一幅车路协同的场景 :
一个闷雷劈下来,天像是被捅漏了似的,大雨突然倾泻而下,世界瞬间变成了汪洋。车队的头车和尾车自动打开了远光灯,每辆车都整齐划一地把速度降低了百分之二十。按事先规划好的路线,车队驶上了黄水大桥的引桥。头车读到引桥路侧电子标志的信号,再一次降低了速度。车顶的激光雷达探测器提高了转速,以保证在恶劣的天气中也能随时发现危险和障碍物……这时,头车雷达突然探测到前方有人类活动,按“自动驾驶车辆人类生命第一”原则,头车立即自动发出紧急刹车指令。两毫秒之内,所有的后车都收到了这条指令。一连串“咔哒”“咔哒”声响起,九十多辆货车的防抱死刹车系统几乎在同时开启,轮胎与地面摩擦发出刺耳的声音,车队速度骤降下来。
对于自动驾驶汽车与道路的关系,国际上有两种截然不同的看法。以欧洲汽车生产商和美国部分跨国资本为首的“独立派”认为,自动驾驶汽车应该实现单独的汽车智能,不依靠车路协同,不依靠道路提供额外的电子信息。由于每个国家的道路情况千差万别,且道路管理权多归政府,对于车企来说,不可控!具备单独智能的汽车可以适应所有国家的道路,产品可以卖到全世界,无需根据不同地方的道路情况进行修改。
而互联网背景的自动驾驶企业和大部分学者则赞成“基于车路协同的自动驾驶”,认为车路协同可以有效提高自动驾驶汽车单车传感器的物理限制,车路协同决策可减少车辆误判,提高交通效率。他们吐槽“独立派”搞了二十多年的研发,也没能实现 L5,显然是“此路不通”嘛!
事实上,道路的建设者与管理者已经在为适应自动驾驶汽车做准备了。
人类驾驶员从发现危险到采取行动的平均反应时间为0.5 秒到 2 秒,具体受疲劳、注意力分散、情绪等因素影响。一般来说,人眼需要约 0.2 秒识别危险,如:突然插队的车辆、突然横穿马路的行人和电动车等 ;大脑需要 0.8 秒来判断风险并决定如何操作,是刹车、转向,还是按喇叭;身体需要 0.4秒采取行动,比如脚从油门切换到刹车,或者转动方向盘等。
而自动驾驶系统通过传感器(激光雷达、摄像头等)实时获取环境数据,结合算法实现操控车辆的闭环反应时间为0.1 秒左右。
假设有一辆汽车,在高速公路上以 120 公里 / 小时的速度行驶,人类 1.4 秒的反应时间对应 43.34 米的距离。自动驾驶 0.1 秒的反应时间对应距离仅 2.8 米,缩短了四十多米的制动距离。显然,在保持同样安全制动距离的条件下,自动驾驶的速度可以更高,高速公路的设计速度可达到 150—200公里 / 小时。
在自动驾驶模式下,若道路的设计时速大幅提高,道路需要有更大的平曲线半径,以保证车辆稳定行驶 ;需要更长的缓和曲线,使车辆行驶轨迹平滑过渡 ;需要更长的视距,包括停车视距、会车视距和超车视距,以确保有足够反应时间。同时,道路允许的最大纵坡坡度减小,避免车辆爬坡时动力不足或下坡时制动失效 ;需要增大竖曲线半径,使车辆在连接不同坡度的路段上能舒适行驶。设计速度越高,对路面平整度和抗滑性能的要求越严格,以减少行车颠簸和侧滑风险。
在车路协同系统中,道路还可以通过多源传感器融合、边缘计算与高速通信技术,将“上帝视角”的道路交通信息传递给自动驾驶车辆。比如在路口,通过部署“激光雷达 + 毫米波雷达 + 摄像头”融合感知系统,实现路口车辆、行人、非机动车实时位置与轨迹的全息感知,联动交通信号灯的相位、倒计时及异常预警。路侧设施还可以将路口被大型车遮挡的行人等隐藏目标情况进行广播,警示自动驾驶车辆提前规避。
自动驾驶汽车接收到路口“上帝视角”的信息后,与自身传感器数据进行二次融合,形成突破单车传感器物理限制超视距感知,比如可以提前预判 200 米外路口的风险,还可以通过多源数据交叉验证,降低如鬼探头、信号灯误读等的误判概率。
道路还可向车辆发送数字化道路交通标志信息、事故信息,车辆接收到之后,通过专用解析软件获取与本车相关的信息,按预先设定的信息处理优先级顺序,对车辆进行控制。数字化交通标志的应用,可以解决现有视频识别交通标志准确性不高的问题。
人类驾驶员在驾车过程中存在大量的交通违法行为,其中违反禁止标线指示的违法行为占比最高,达到 24.9%,违反道路交通信号灯的行为占比为 21.4%,占道行驶占 14.0%,违反禁令标志占 14.0%,违反规定使用专用车道占 12.4%。大量的交通违法行为严重危害了交通安全,造成大量事故。数字化交通标志加严格按交通法规行驶的自动驾驶车辆,将大大降低因违反交通法规造成的事故。
06
技术话语权与壁垒
自动驾驶标准制定是众多组织与企业参加、争抢的热点。技术话语权是未来智能交通发展的重要因素。技术话语权主要表现在几个方面 :标准、高壁垒的技术发展、影响技术决策和引导技术应用的能力。
按使用范围,标准可以分为国际标准、国家标准、行业标准、团体标准和企业标准。电信、海运、航空运输等领域有全球统一技术指标的需求,国际标准非常“硬”,非常“实”,不遵守国际标准的产品很难大范围销售。
在这种情况下,国家标准,尤其是强制性国家标准,和具有行政令性质的行业规范一般是必须执行的。国际标准化组织(ISO)中的智能运输系统标准化技术委员会(TC204)、车辆标准化技术委员会(TC22)都专门开设了与自动驾驶相关的工作组。
ISO 标准采用投票机制,每个国家一票。欧洲国家多,票数也多。ISO 标准从提出、制定到发布要经过繁多的环节,每个环节都需要反复讨论和投票,时间相当漫长。一般来说,一个国际标准从提出到发布需要 5 年时间,有的甚至更长。
国际标准经常由于各种原因半路夭折。比如,成员国对标准的技术内容存在重大分歧,有的企业拼命想把自己的专利塞进标准,今后好收取专利使用费,而其他企业拼死要把对方的专利技术从标准中剔除,多方无法达成一致意见,致使标准无法推进而终止。国际标准的制定还需要雄厚的财力支持。除了人力成本之外,需要大量去往世界各地开标准讨论会的差旅费,一般的中小企业难以承担。在标准制定过程中,有时会遇到主编机构或企业的人力、经费资源不足,无法有效推进标准的起草、讨论和修改,因进度滞后而被终止的情况。
曾经制定了手机全球移动通信(GSM)标准的欧洲电信标准化协会(ETSI)与电气和电子工程师协会(IEEE)内部也成立了专门的小组,致力于制定与自动驾驶和车路协同相关的通信标准及测试规范。
标准可以成为技术壁垒,阻挡其他企业或区域进入。也可以打破技术壁垒,让更多的厂商进入。二十一世纪初,随着高等级道路建设步伐加快,我国对交通流检测器的需求量大增。过去,路上多采用环形线圈交通流检测器,即在路面下埋设铜线绕成的闭合回路线圈,产生交变电磁场。当车辆经过时,线圈电感量会发生变化,检测器通过测量电感量变化来判断是否有车辆经过。环形线圈检测器需要切割路面埋设,而且只支持单车道或有限几个车道检查,在雨雪天气经常测不准。这种检测器还很容易坏,坏了之后只能再次把路刨开维修或者更换,十分麻烦。而国外进口的微波交通流检测器技术先进,只需要安装在路边的立柱上,不用破坏路面,它可以支持多个车道同时检测,不受天气影响,还可以检测静止车辆、行人和非机动车,相对于环形线圈更有优势。
当时,国内没有厂商能生产微波交通流检测器,只能从国外进口,设备售价十分昂贵。进口的设备不提供数据接口,只能用自带的软件,给使用带来许多不便。一旦设备坏了,需要工程师上门维修,国外厂商的工程师从到机场开始,按时间收取高额人工费。面对这种“卡脖子”的情况,中国进行了自有知识产权设备的研发,并制定了国家标准。在标准中明确规定了微波交通流检测器数据输出的格式,在后续的工程设备采购中,只有符合国家标准的设备才有资格参与投标。最终用标准的手段,打破了技术壁垒。随着研发生产同类产品的民族企业越来越多,成功将微波交通流检测器的价格降到了进口产品的五分之一。
我国自动驾驶技术标准主要集中在辅助驾驶领域,正在努力构建面向产业,覆盖生产、测试、服务等环节的标准体系。可以预见,随着自动驾驶技术走向成熟,面向车路信息交互、智能基础设施、信息安全等标准化领域的斗争也将进入白热化。
自动驾驶作为人工智能最大的应用领域之一,吸引了无数投资者进入。投入大量资金研发出产品后,从市场上赚到钱,保持企业可持续发展,却不那么容易。
全球自动驾驶行业市场规模持续扩大。2019 年,全球自动驾驶产业融资总额达 66.4 亿美元,2024 年增长至约 2074亿美元,同比增长 31.0%。其中,中国投融资约占全世界总量的 15%。摩根士丹利预测,2030 年全球自动驾驶市场规模将达 2 万亿美元。2035 年,随着自动驾驶法规与技术成熟,私家车将逐步转向全自动驾驶。
自动驾驶领域的参与者主要有两类。一类是像百度和谷歌这样的人工智能软件开发商,以开发自动驾驶人工智能软件为主。第二类是如长安、一汽红旗、吉利、北汽、奇瑞等汽车厂商。由于竞争激烈,初创公司很难与科技巨头和传统车企抗衡。自动驾驶技术的商业化路径尚不清晰,许多公司难以实现盈利。但随着技术的进步,相信将来能突破复杂场景下的自动驾驶关键技术,其应用会从港口、矿山等封闭场景向干线物流、城市出行渗透。
07
未来交通畅想
科幻小说《自动驾驶》中描写道 :
还没到上班的早高峰,高速路上却已经是川流不息。内侧车道上,几十辆汽车像火车车厢般首尾相连,以二百五十公里的标准时速疾驰而过,电力驱动的发动机非常安静,经过特殊设计的轮胎与地面摩擦,发出“咝咝”声。为减少风阻,这些车辆都长有圆乎乎、形状一模一样的头尾,像粒巨大的铁皮胶囊。过去老式汽车必不可少的后视镜和雨刷,在自动驾驶的汽车上全无一用。

未来乘客
实际上,小说中描写的汽车如列车般编队行驶,已经在各国有过大量测试,自动驾驶车辆编队行驶是高速公路上最具代表性的自动驾驶应用。车队中的每辆汽车上均安装有车载终端,在编队行驶状态下,车与车之间通过专用短程通信系统相互发送消息,可以做到整个车队同时加速或减速,保持稳定的车辆间隙。由于车距十分接近,两车之间形成气流真空区,能够大幅降低空气阻力,降低燃油消耗。
自动驾驶将颠覆目前交通事故责任的划分规则。在 L3以下,责任人仍然是驾驶员,因智能驾驶系统问题造成的事故,汽车生产商是不负责的。而在 L3 阶段,车企和驾驶员共同承担责任,但是由于驾驶员方举证困难,还是不能大意。在 L4、L5 阶段,出了事故,乘客和第三方无责,应该由车辆所有人或者管理人承担事故责任,也可向车企追偿由于技术缺陷导致的责任。
自动驾驶的全面实施,将大力促进共享经济的发展。目前私家车的使用率并不高,大部分时间都停在车库里吃灰。而自动驾驶的汽车可以连续不断地工作,大幅降低交通运输成本,同时节省停车位占用的土地。
尽管自动驾驶距离最终的 L5 还有一定距离,但没有人会怀疑,L5 总有一天会到来。那时候的交通,是什么样的呢?
让我们畅想一下自动驾驶全面到来的美好未来吧!
08
自动驾驶的未来场景
当夕阳的余晖温柔地给昆明的城市天际线描上一道金边,你关上电脑,乘坐电梯下楼。一辆线条流畅的双层自动驾驶房车已经停在街边,等待你的到来。扫描你的脸之后,车门缓缓开启。
“欢迎乘坐‘越洋号’双层洲际房车。您的行李已经装载。请按下出发键,开始您的旅程。”
你按下闪烁的奶白色按钮。车辆启动,汇入下班的车流。
这是一个只属于你的远离尘嚣的私密空间。你无需紧握方向盘,也不必担心路况的纷扰。你脱下西服,换上运动衫和拖鞋,可以在车上继续未完成的工作,也可以放倒座椅靠背,在轻音乐中放空思绪。
高速公路上,“越洋号”与无数大小不一的无人驾驶汽车编队行驶,像火车似的一长串。很快,车队经由瑞丽进入了缅甸。翠绿的茶山与橡胶林绵延,远处雨林雾气缭绕。经过田野时,不时可见飞鸟在远山边翱翔。
车队中,不时有车离开,也有新车加入。正在欣赏车外美景的你不会注意到,路上每一百公里,会出现一段画着蓝色标线的路段。那表示道路下铺设有线圈,通过磁感应将电能无线传输至车辆底部的接收线圈。车辆无需停下来充电,可以一直前行。
当你看到公路两侧恒河与布拉马普特拉河的支流如银线般密布,在夕阳下闪烁着粼粼波光时,你知道已经进入孟加拉国境内。由于“越洋号”朝西一直追逐着夕阳,傍晚的时间被拉长了。当路边出现悠闲踱步的白牛时,你在手机上下单点了印度菜。“越洋号”脱离车队,速度慢了下来。一辆无人机准确无误将美食投放到车顶的专用平台上。你不需要下车,就享受到了微辣鲜嫩的玛莎拉羊肉、椰蓉烤饼、土豆花椰菜咖喱以及加了水果与薄荷叶的酸奶饮品拉西。


纪录片《在有树的草原上》
夜幕低垂,“越洋号”驶上了印度—索马里跨海大桥。食饱饭足的你洗了个热水澡,放下投影幕布,躺在床上看了一场电影。
车灯照耀下的公路像一条银色的丝带,在茫茫印度洋中延伸到遥远的天际。左侧的大海静谧而深邃,海面上,星星点点的渔火在远处闪烁。右侧与公路并行的海岸线轮廓模糊不清。你用语音呼叫“越洋号”,打开车顶的遮阳帘。头顶的天空,星河浩瀚。
当第一缕曙光羞涩地落在脸上,将你从沉睡中唤醒时,“越洋号”已经到了目的地——东非大草原。
微风轻拂,草浪层层翻涌,宛如绿色的海洋泛起温柔的涟漪,空气中弥漫着青草的芬芳与泥土的醇厚气息。
一匹斑马正在窗前悠闲地吃着草。天空中,几只红颊蓝盘尾鸟翩跹飞舞,鸣叫声清脆悦耳。一群长颈鹿迈着优雅的步伐,在草原上缓缓踱步到几棵猴面包树前,搜寻着高处的树叶。
这一刻,生命无比美好。


